

EtherCAT Explained: Deterministic Real-Time Ethernet for Modern Machine Control
10 March, 2026 | EtherCAT system, EtherCAT protocol, EtherCAT real-time Ethernet, EtherCAT motion control, EtherCAT master slave, EtherCAT network topology, EtherCAT cycle time, EtherCAT distributed I/O, Servo over EtherCAT (SoE), EtherCAT servo drives,

EtherCAT (Ethernet for Control Automation Technology) is a real-time Industrial Ethernet system built for automation tasks where timing has to be predictable, especially motion control and tightly coordinated I/O. The core idea is simple: the controller (the EtherCAT master) sends a frame at a fixed cycle rate, and each device on the network (an EtherCAT slave) updates its own process data as the frame passes through. Instead of devices taking turns with separate packets, EtherCAT keeps overhead low and keeps data exchange synchronized across the entire machine.
That deterministic cyclic exchange is why EtherCAT shows up in servo systems, packaging machines, robotics, CNC subsystems, and high-speed assembly lines. In those environments, the important part isn’t just “fast” it’s repeatably fast. You want the same update interval, the same ordering, and minimal jitter so axis commands, encoder feedback, and machine I/O line up with the control loop every cycle. EtherCAT is also designed to carry service/diagnostic traffic without turning the network into a timing lotter so you can tune drives and troubleshoot devices while the system architecture stays consistent.
What EtherCAT looks like in a real machine
In a typical system, an IPC/PLC acts as the master and the network includes a mix of servo drives, I/O couplers, and modular terminals. EtherCAT commonly uses line topologies and can branch using junctions/couplers. Because the master controls the schedule, the network behaves like a machine-wide “heartbeat”: each cycle produces a coherent snapshot of inputs and outputs, and the next cycle applies the next set of commands.
When you think about EtherCAT in practical terms, it’s less like “Ethernet with a protocol” and more like a deterministic timing backbone that keeps motion and I/O participating in the same cycle. That’s also why engineers like it for machines that must correlate events precisely—like turning on an output at a specific cam point, triggering a cutter at a precise axis position, or sampling sensors in sync with motion.
Three Product Examples of EtherCAT
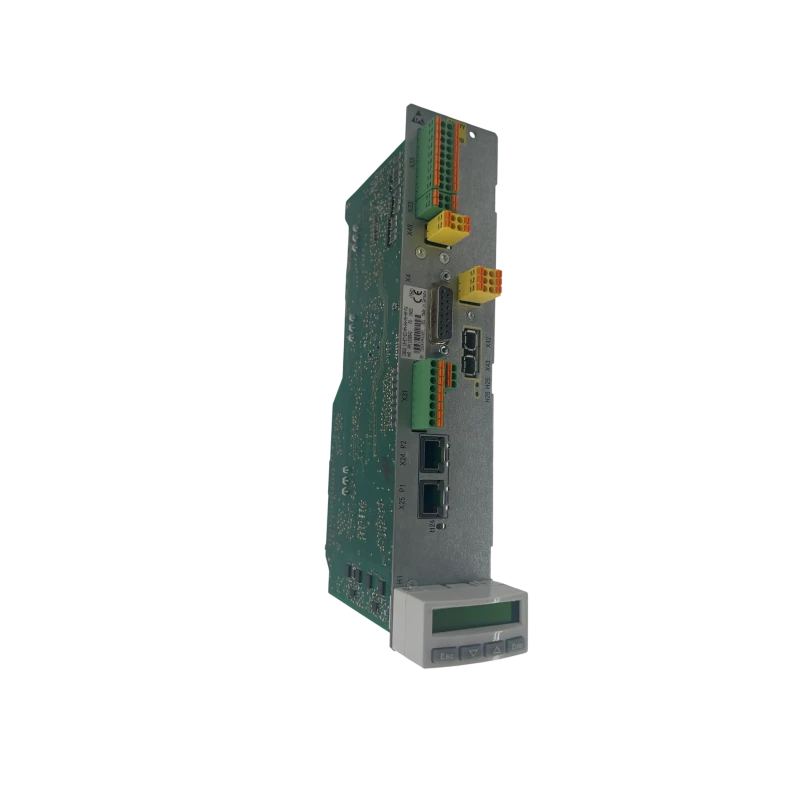
Bosch Rexroth: CSB02.1B-ET-EC-NN-S4-NN-NN-FW IndraDrive control section with Multi-Ethernet (ET) integration
A Bosch Rexroth IndraDrive CSB drive control section configured with Multi-Ethernet (“ET”) like the CSB02.1B-ET-EC-NN-S4-NN-NN-FW is used to bring the drive system onto Ethernet-based fieldbuses, including EtherCAT, so the controller can exchange cyclic command/feedback data deterministically. In practical motion control use, EtherCAT becomes the pathway for setpoints, state control, actual values, and fault/state feedback.
The Bosch Rexroth CSB02.1B-ET-EC-NN-S4-NN-NN-FW servo drive integrates Ethernet-based communication for high-speed data transmission and supports TTL and Resolver encoders.
Beckhoff: BK1120 EtherCAT Bus Coupler
The Beckhoff BK1120 is an EtherCAT bus coupler used to create a modular distributed I/O station. It connects directly to the EtherCAT network and links the EtherCAT process image to the terminals behind it, which is how a controller can read sensors and drive outputs as part of the same deterministic cyclic exchange used for motion. In real machines, devices like this are what make EtherCAT scalable: you can place I/O where it physically belongs, keep wiring sensible, and keep everything synchronized at the controller.

The BK1120 EtherCAT Bus Coupler supports up to 64 K-bus terminals, utilizes a data transfer medium of Ethernet/EtherCAT CAT5 cable, and operates at a baud rate of 100 Mbit/s.
Kollmorgen: AKD servo drive with EtherCAT
Kollmorgen AKD Servo drives such as the AKD-P00607-NBCC-0000 are commonly deployed in EtherCAT motion architectures, where deterministic cyclic updates are essential for servo performance and coordinated multi-axis control. EtherCAT carries the cyclic control data that the drive uses to execute commanded motion and return feedback/status in lockstep with the master’s cycle.
The Kollmorgen AKD-P00607-NBCC-0000 Ethernet servo drive comes with EtherCAT and CANopen connectivity options. This drive can be connected to only three-phase industrial supply networks.

Why EtherCAT Matters
EtherCAT’s value becomes obvious when you look at failure modes in real automation: timing drift between axes, outputs firing “late,” sensors sampled inconsistently, intermittent network faults that only appear under load, and commissioning that’s painful because diagnostics are slow or unreliable. EtherCAT attacks those problems at the system level by making communication timing intentional and repeatable, so motion, I/O, and feedback are bound to the same network schedule rather than floating around with best-effort delivery.
That’s also why EtherCAT is such a practical standard in mixed systems: a single network can coordinate servo drive platforms like Bosch Rexroth IndraDrives or Kollmorgen AKDs while simultaneously pulling in modular I/O through Beckhoff couplers and terminals. When it’s implemented well, the machine feels “tighter”: better synchronization, more stable control, faster fault isolation, and fewer surprises when you raise performance or add axes.

If you’re running an EtherCAT system using legacy or obsolete Rexroth, Kollmorgen, or Beckhoff components and need help find replacements or repairs then contact Wake Industrial at 919-443-0207 or email sales@wakeindustrial.com. Wake Industrial specializes in obsolete automation parts and will get you a fair and fast quote.
(Please be advised that Wake Industrial does not offer troubleshooting assistance through phone or email. For repair, replacement, or refurbishment needs, we invite you to use our quote form or call us at 919-443-0207.)
Request a Quote
Cary, NC 27513









