

Understanding CANopen: How CANopen Works in Industrial Automation
20 March, 2026 | CANopen system, CANopen protocol, CANopen communication, CAN bus industrial automation, PDO vs SDO, CANopen object dictionary, CANopen network management, CANopen SYNC EMCY, Bosch Rexroth CANopen, Bosch Rexroth IndraDrive CANopen
Industrial machines rely on more than power and motion. They also depend on communication systems that let drives, controllers, valves, and other intelligent devices exchange commands, feedback, diagnostics, and configuration data in a reliable way. CANopen is one of the most established examples of that kind of communication system. Built on top of the Controller Area Network, or CAN bus, CANopen adds a standardized structure that helps devices communicate in a more organized and predictable manner.
That distinction matters. A standard CAN network can move data efficiently, but it does not define how a device should organize its parameters, how it should report faults, or how it should behave during startup and operation. CANopen fills in those gaps. It creates a common framework for device communication, which is why it has remained relevant in industrial automation, embedded control, hydraulics, and motion systems even as many newer Ethernet-based networks have become more common.
What CANopen Actually Is
CANopen is a higher-layer protocol and device model built on CAN. The CAN layer handles the physical transmission of messages across the network, while CANopen defines how those messages are structured and how devices on the network should organize their data. In other words, CANopen turns CAN from a transport mechanism into a usable automation communication system.
One of the core ideas behind CANopen is the object dictionary. Every CANopen device has an object dictionary that acts as a structured internal map of its communication parameters, operating values, configuration data, and application-specific information. Instead of relying on undocumented message formats or vendor-specific shortcuts, engineers can work with a standardized parameter model. This makes devices easier to commission, integrate, and troubleshoot.
That is especially important in motion-control hardware. A Bosch Rexroth control section is not just passing commands back and forth. It also needs to expose parameters, monitor states, report faults, and support configuration changes. A control section like the CSB01.1C-CO-ENS-EN1-NN-S-NN-FW benefits from that structure because it sits at the intersection of drive behavior and network communication. CANopen provides a clear way to organize those interactions.

The CSB01.1C-CO-ENS-EN1-NN-S-NN-FW is manufactured by Bosch Rexroth Indramat. This servo drive has a CANopen / DeviceNet Master Communication.
The Role of PDOs and SDOs
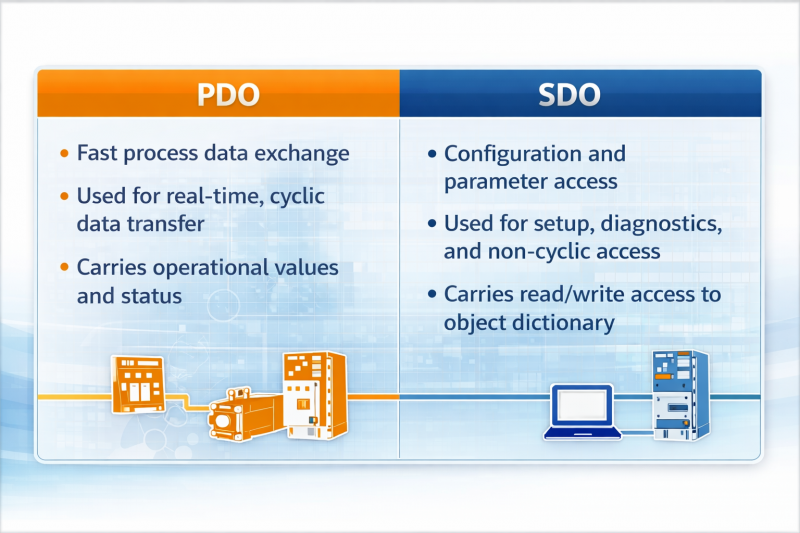
CANopen becomes easier to understand once you look at how it separates different kinds of communication. Two of the most important mechanisms are Process Data Objects, or PDOs, and Service Data Objects, or SDOs.
PDOs are used for fast runtime data exchange. These messages typically carry information that matters during live machine operation, such as control words, speed commands, torque references, status words, and feedback values. PDO communication is designed to be efficient because it supports the ongoing behavior of the machine.
SDOs serve a different purpose. They are used for reading and writing entries in the object dictionary, which makes them essential for commissioning, diagnostics, parameter changes, and maintenance tasks. When an engineer needs to adjust a setting, verify a parameter, or access device information that is not part of the continuous runtime exchange, SDO communication is usually involved.
This separation is one reason CANopen works so well in control applications. A Bosch Rexroth control section such as the CSH01.1C-CO-ENS-NNN-NNN-NN-S-NN-FW may need cyclic process communication during operation while also supporting parameter access during setup and troubleshooting. CANopen allows both to exist within one structured protocol instead of forcing everything into the same message style.
Network Management and Device States
Another major advantage of CANopen is that it does not treat every device on the network as if it should always be active in the same way. Instead, it uses Network Management, or NMT, to control how devices behave.
A CANopen node typically moves through defined states such as initialization, pre-operational, operational, and stopped. These states determine what type of communication the node is allowed to perform and whether it is fully participating in the network. This gives CANopen a level of order that is extremely valuable in industrial systems where startup sequence, fault recovery, and coordinated machine behavior matter.
This state-based approach is especially relevant in motion-control systems. A drive-control platform must do more than receive commands; it has to transition into readiness, handle faults cleanly, and interact predictably with the rest of the machine. A Bosch Rexroth model like the CSH01.2C-CO-NNN-NNN-CCD-NN-S-NN-FW is a good example of the kind of hardware that benefits from this disciplined communication model. In systems like that, network behavior is part of machine performance, not just a background feature.
SYNC, EMCY, and Coordinated Behavior
CANopen also includes communication services that support synchronization and fault handling. These functions are part of what makes the protocol useful for automation instead of just convenient for wiring.
SYNC messages help devices coordinate their actions in time. In applications where multiple nodes need to update values or respond in a synchronized way, SYNC provides a common timing reference. That can be important in drive systems, coordinated hydraulics, and distributed control tasks where timing consistency affects performance.
EMCY, or emergency messaging, gives devices a standardized way to report serious faults. Instead of every manufacturer inventing its own fault-broadcasting method, CANopen provides a recognized mechanism for communicating device-level problems to the rest of the system. That helps supervisory control, diagnostics, and troubleshooting.
These capabilities make CANopen more than a communication convenience. They make it a system for structured machine behavior. In a Bosch Rexroth IndraDrive environment, where a control section is part of a broader motion platform, communication has to support timing, state changes, and fault response as well as simple data transfer. That is why CANopen remains meaningful in real industrial applications.

Why CANopen Is Still Used
CANopen has stayed relevant because it solves practical engineering problems without unnecessary complexity. Many industrial systems do not require the bandwidth or infrastructure of industrial Ethernet, but they still need a communication method that is more disciplined than raw CAN messaging. CANopen fills that middle ground well.
It is widely understood, mature, and structured. Engineers can work with device profiles, object dictionaries, defined state models, and consistent communication behavior instead of building custom solutions from scratch. That reduces integration effort and often makes ongoing maintenance easier.
For machinery builders and maintenance teams, that matters just as much as raw performance. A network that is understandable and serviceable often provides more real-world value than one that is technically faster but harder to deploy or troubleshoot. CANopen’s longevity comes from the fact that it combines simplicity at the bus level with meaningful structure at the protocol level.
If you’re running an CANopen system using Bosch Rexroth Indramat parts and need help find replacements or repairs then contact Wake Industrial at 919-443-0207 or email sales@wakeindustrial.com. Wake Industrial specializes in legacy Bosch Rexroth Indramat equipment and will get you a fair and fast quote.
(Please be advised that Wake Industrial does not offer troubleshooting assistance through phone or email. For repair, replacement, or refurbishment needs, we invite you to use our quote form or call us at 919-443-0207.)
Request a Quote
Cary, NC 27513









