

AKD-P00606-NBEC-0000 Kollmorgen
")
Wake Industrial LLC is not an authorized distributor of this product.
- Straightforward Pricing: No Rush Fees, No Credit Card Fees
The Kollmorgen AKD-P00606-NBEC-0000 belongs to the AKD Servo Drives series and weighs 1.1 kilograms. This standard USA variant features a nominal current of 6 Arms and a peak output current of 18 Arms for 5 seconds. It offers EtherCAT fieldbus connectivity and is rated for a supply voltage of 120 or 240 Vac single or three phase with a rated input power of 2.38 KVA.

To contact sales for pricing and lead time:
Payment Methods

Shipping Methods
Our Credentials


Product Description:
The AKD-P00606-NBEC-0000 is an AC servo drive manufactured by Kollmorgen and supplied within the AKD Servo Drives series. As a member of the AKD Servo Drive product family, it is intended to deliver closed-loop motion control for rotary or linear motors in automated machinery. The unit interfaces between the line supply and the motor, regulates current and voltage based on feedback, and provides positioning, velocity, and torque functions necessary for industrial automation.
Electrical limits describe how the drive interacts with connected power networks and loads. The continuous phase rating is 6 Arms, meaning it can supply six amperes of sinusoidal RMS current to the motor without derating. For short acceleration bursts, it can deliver a peak of 18 Arms for five seconds, allowing extra torque during machine indexing. Power drawn from the mains under an S1 duty cycle is specified at 2.38 kVA, a figure used when sizing circuit protection and cabinet cooling. Input flexibility is provided by a dual-range supply of 120 / 240 Vac 1~/3~, so the same hardware accepts single-phase or three-phase sources commonly found in North American plants. These electrical parameters must be matched with motor impedance to avoid saturation and to ensure the current-mode regulator operates within its linear range.
Control and mechanical attributes complete the profile. The drive uses the Position Indexer version, so it can execute stored motion sequences after receiving trigger commands from the network. Real-time communication is handled over EtherCAT, supporting distributed clocks and cyclic data exchange with Kollmorgen automation controllers. The build listed as Standard USA indicates regional conformity in labeling, fusing, and EMC limits, while the expansion slot is listed as None (rev 8+), confirming that no auxiliary encoder or I/O card occupies the slot. Despite these functions, the enclosure weighs only 1.1 kg, easing panel installation and allowing high power density when multiple drives share the same heat sink rail.
Standard USA
Position Indexer
EtherCAT
None (rev 8+)
6 Arms
18 Arms
- AKDP00606-NBEC-0000
- AKD-POO6O6-NBEC-OOOO
Instructions
How to Determine What Torque You Need for Your Servo Motors
When building a robotic system with servo motors, determining the appropriate torque for each motor is essential. Torque is what allows the servo motor to effectively lift, hold, or move an object. Without sufficient torque, your motor either won’t perform as expected or may damage itself trying.
Here, we’ll break down how to calculate the torque you need, then pivot into some key nuances around how torque works in different contexts.
What Is Torque?
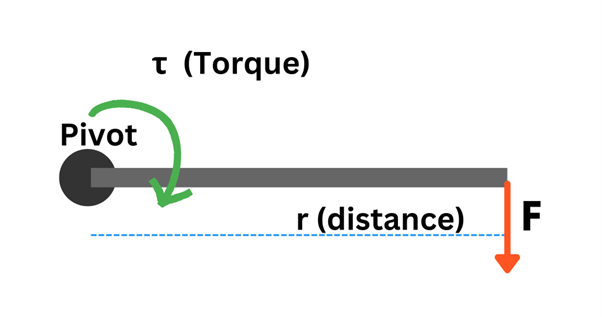
Torque is a force applied over a distance that causes rotation. You use torque every day when you twist open a jar or turn a doorknob. In the case of servo motors—specifically in robotics—torque determines how much weight a motor can rotate at a certain distance away from its axis. Think about a robotic arm lifting a heavy object: the motor's torque directly affects how much weight the arm can lift, and at what speed.
Mathematically, torque is expressed as:
τ = r × F
- τ is torque,
- r is the distance from the axis of rotation,
- F is the force applied.
If that feels abstract, consider that F is usually the force caused by gravity, meaning it depends on the weight of the object and its distance from the motor's center.
Torque and Servo Motors: The Core Relationship
Servo motors are frequently used in robotic arms or other machines with rotational mechanisms. The amount of torque a servo motor can exert determines its capability to perform mechanical tasks, especially when dealing with varying loads.
The lever arm length—the distance from the rotation point to the load—amplifies the effect of the weight being moved. A longer lever arm requires more torque even if the weight remains the same. So, as we dive into calculations, remember that torque isn't just about force; it’s also about how far away from the motor's axis that force is applied.
Formula Recap
The standard torque equation for servo motors typically used in applications like robotic arms can be expanded slightly:
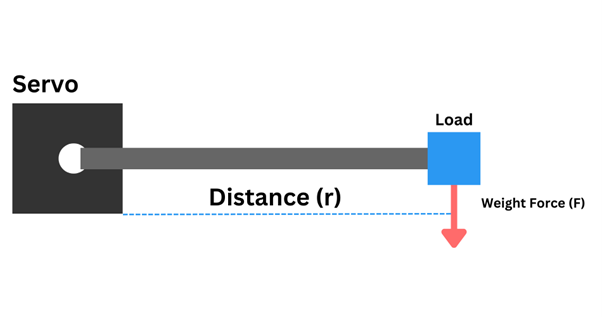
τ = r × m × g
- r is the distance from the motor's axis to where the load is applied,
- m is the mass of the item being moved (in kilograms),
- g is the acceleration of gravity (~9.81 m/s²).
Let’s translate this into something more immediately practical: a robotic arm needs torque to lift an object at the end of the arm. If the arm is long, you’ll need more torque to achieve that same lift, even if the object you’re lifting doesn’t change in weight.
Components of Torque in Servo Motors
1. Weight of Components
The force caused by the weight of objects being moved is simple physics. Every load you expect the motor to handle has a weight. Multiplied by gravity, that’s your F.
A robotic arm lifting a box must overcome the weight of the box. However, the motor also needs to account for the weight of the components themselves, like robotic arm links or grippers.
2. Distance from the Pivot
The lever arm length is just as crucial. Calculating torque by only considering force and weight without factoring in the arm’s length will result in inaccurate torque requirements and potentially a poor design.
Case Study: A Simple Robotic Arm
Imagine an arm that needs to lift a 1.5 kg box at the end of a 0.5-meter-long arm.
- m = 1.5 kg
- r = 0.5 m
- g = 9.81 m/s² (constant)
We’re now ready to plug in values:
τ = r × m × g
τ = 0.5 m × 1.5 kg × 9.81 m/s²
τ = 7.36 Nm
This means you require a minimum torque of 7.36 Newton-meters (Nm) to lift the box at the end of this particular robotic arm.
Angular Acceleration
In any instance where you need the servo motor to move a load and not just hold it, you must also account for angular acceleration. Angular acceleration means your motor needs extra torque at the beginning and during changes in movement. To calculate it:
τ = I × α
- I is the moment of inertia of the robot arm (resistance to angular motion),
- α is angular acceleration.
This means that for movements such as high-speed rotations or rapid direction changes, torque requirements jump. The speed with which the load moves and how quickly the direction changes are factored into torque calculations for dynamic motion.
Final Thoughts
To summarize everything, calculating torque isn’t just as simple as deciding how heavy a load is. It requires you to think about:
- Distance (where the weight is applied from the axis),
- Weight of the object being moved,
- The weight of other mechanical components (like links and joints inside the machine),
- Angular acceleration, especially if the motor will be moving or changing directions rapidly,
- Safety margins (plan a buffer of 20-30% torque capability beyond the minimum).
The general idea is that the larger the load or the further away from the pivot, the more torque you need. By thinking through all of these details, you can properly size your servo motor torque needs, ensuring your motor will handle everything smoothly without underperformance during operation.
Get expert servo motor guidance and competitive pricing from Wake Industrial. Whether you need one motor or a complete system, we'll help you find the right solution at the right price. Call 1-919-443-0207 now for a quick quote or email sales@wakeindustrial.com to browse our extensive servo motor inventory.
Instructions
How to Determine What Torque You Need for Your Servo Motors
When building a robotic system with servo motors, determining the appropriate torque for each motor is essential. Torque is what allows the servo motor to effectively lift, hold, or move an object. Without sufficient torque, your motor either won’t perform as expected or may damage itself trying.
Here, we’ll break down how to calculate the torque you need, then pivot into some key nuances around how torque works in different contexts.
What Is Torque?
Torque is a force applied over a distance that causes rotation. You use torque every day when you twist open a jar or turn a doorknob. In the case of servo motors—specifically in robotics—torque determines how much weight a motor can rotate at a certain distance away from its axis. Think about a robotic arm lifting a heavy object: the motor's torque directly affects how much weight the arm can lift, and at what speed.
Mathematically, torque is expressed as:
τ = r × F
- τ is torque,
- r is the distance from the axis of rotation,
- F is the force applied.
If that feels abstract, consider that F is usually the force caused by gravity, meaning it depends on the weight of the object and its distance from the motor's center.
Torque and Servo Motors: The Core Relationship
Servo motors are frequently used in robotic arms or other machines with rotational mechanisms. The amount of torque a servo motor can exert determines its capability to perform mechanical tasks, especially when dealing with varying loads.
The lever arm length—the distance from the rotation point to the load—amplifies the effect of the weight being moved. A longer lever arm requires more torque even if the weight remains the same. So, as we dive into calculations, remember that torque isn't just about force; it’s also about how far away from the motor's axis that force is applied.
Formula Recap
The standard torque equation for servo motors typically used in applications like robotic arms can be expanded slightly:
τ = r × m × g
- r is the distance from the motor's axis to where the load is applied,
- m is the mass of the item being moved (in kilograms),
- g is the acceleration of gravity (~9.81 m/s²).
Let’s translate this into something more immediately practical: a robotic arm needs torque to lift an object at the end of the arm. If the arm is long, you’ll need more torque to achieve that same lift, even if the object you’re lifting doesn’t change in weight.
Components of Torque in Servo Motors
1. Weight of Components
The force caused by the weight of objects being moved is simple physics. Every load you expect the motor to handle has a weight. Multiplied by gravity, that’s your F.
A robotic arm lifting a box must overcome the weight of the box. However, the motor also needs to account for the weight of the components themselves, like robotic arm links or grippers.
2. Distance from the Pivot
The lever arm length is just as crucial. Calculating torque by only considering force and weight without factoring in the arm’s length will result in inaccurate torque requirements and potentially a poor design.
Case Study: A Simple Robotic Arm
Imagine an arm that needs to lift a 1.5 kg box at the end of a 0.5-meter-long arm.
- m = 1.5 kg
- r = 0.5 m
- g = 9.81 m/s² (constant)
We’re now ready to plug in values:
τ = r × m × g
τ = 0.5 m × 1.5 kg × 9.81 m/s²
τ = 7.36 Nm
This means you require a minimum torque of 7.36 Newton-meters (Nm) to lift the box at the end of this particular robotic arm.
Angular Acceleration
In any instance where you need the servo motor to move a load and not just hold it, you must also account for angular acceleration. Angular acceleration means your motor needs extra torque at the beginning and during changes in movement. To calculate it:
τ = I × α
- I is the moment of inertia of the robot arm (resistance to angular motion),
- α is angular acceleration.
This means that for movements such as high-speed rotations or rapid direction changes, torque requirements jump. The speed with which the load moves and how quickly the direction changes are factored into torque calculations for dynamic motion.
Final Thoughts
To summarize everything, calculating torque isn’t just as simple as deciding how heavy a load is. It requires you to think about:
- Distance (where the weight is applied from the axis),
- Weight of the object being moved,
- The weight of other mechanical components (like links and joints inside the machine),
- Angular acceleration, especially if the motor will be moving or changing directions rapidly,
- Safety margins (plan a buffer of 20-30% torque capability beyond the minimum).
The general idea is that the larger the load or the further away from the pivot, the more torque you need. By thinking through all of these details, you can properly size your servo motor torque needs, ensuring your motor will handle everything smoothly without underperformance during operation.
Get expert servo motor guidance and competitive pricing from Wake Industrial. Whether you need one motor or a complete system, we'll help you find the right solution at the right price. Call 1-919-443-0207 now for a quick quote or email sales@wakeindustrial.com to browse our extensive servo motor inventory.
Frequently Asked Questions about AKD-P00606-NBEC-0000:
Q: What drive version does the AKD-P00606-NBEC-0000 servo drive use?
A: This unit features a Position Indexer drive version, allowing direct position control capabilities.
Q: What type of fieldbus connectivity is supported by the AKD-P00606-NBEC-0000 servo drive?
A: The AKD-P00606-NBEC-0000 is equipped with EtherCAT fieldbus connectivity for network integration.
Q: What is the nominal current rating for the AKD-P00606-NBEC-0000?
A: This model operates with a nominal current of 6 Arms during continuous duty cycles.
Q: What is the peak output current the AKD-P00606-NBEC-0000 can deliver?
A: A peak output current of 18 Arms is available for up to 5 seconds on this drive.
Q: What is the rated input power of the AKD-P00606-NBEC-0000 servo drive?
A: The rated input power for this model is 2.38 KVA, suitable for a range of servo applications.









