

PMB33F-10214-00 Pacific Scientific
Wake Industrial LLC is not an authorized distributor of this product.
- Straightforward Pricing: No Rush Fees, No Credit Card Fees
Current response time:
3 Minutes
59 Seconds
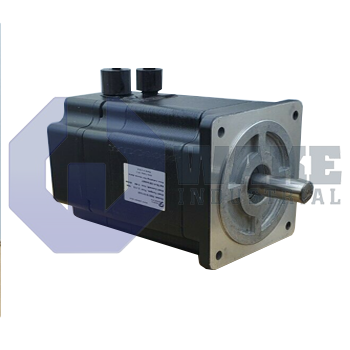
The Pacific Scientific PMB33F-10214-00 is a NEMA Size 34 brushless servomotor and part of the PMB Brushless Servomotors series. This standard motor features flying leads with MS connectors, a round shaft design, and uses a digital encoder with commutation offering 2048 pulse per revolution resolution. It has a nominal stall current of 11.0 ARMS at 240 VAC max and uses a stack length multiple of 3.

To contact sales for pricing and lead time:
Payment Methods

Shipping Methods
Our Credentials


Product Description:
The PMB33F-10214-00 is a brushless servomotor manufactured by Pacific Scientific and delivered in the PMB Brushless Servomotors series. In automated equipment, it converts amplifier commands into controlled torque and speed so that linear tables, rotary indexers, and compact robotic axes can follow programmed motion with repeatable accuracy. Its permanently excited electromagnetic design eliminates brush wear, which helps reduce routine maintenance and supports continuous-duty positioning. This operating style also gives the motor the fast response expected in closed-loop servo systems where steady tracking and smooth correction are required.
Its frame follows the NEMA size 34 standard, so the face pattern matches common mounts and gearheads used on compact motion axes. Feedback is supplied by an optical encoder rated at 2048 ppr, which provides a pulse stream suitable for precise speed and position feedback. The sensing package is a digital encoder with commutation, so the drive receives both incremental feedback and the commutation signals needed for proper electronic switching. When operated from a 240 VAC bus, the winding has a nominal stall current of 11.0 ARMS, which helps determine suitable drive sizing and thermal loading. Electrical connections are routed through flying leads with MS connectors, allowing power, signal, and ground conductors to be terminated without a separate motor terminal box.
The mechanical output uses a round shaft, so clamping hubs and set-screw couplings can be positioned along the machined surface without aligning to a key. Extra torque capability comes from a stack length multiple of 3, which increases the active magnetic length while keeping the same frame outline. It is supplied as a standard motor, using the regular winding and magnet arrangement for this model rather than a special build. That combination makes the motor suitable for general-purpose servo axes where stable feedback, compact mounting, and consistent coupling geometry are needed.
Frequently Asked Questions about PMB33F-10214-00:
Q: What type of connector is used on the PMB33F-10214-00 servomotor?
A: This model features flying leads with MS connectors for straightforward electrical integration.
Q: What is the encoder resolution on the PMB33F-10214-00 servomotor?
A: The digital encoder in this motor provides a resolution of 2048 pulses per revolution for accurate feedback.
Q: What shaft design does the PMB33F-10214-00 servomotor have?
A: The PMB33F-10214-00 uses a round shaft design for direct coupling to compatible equipment.
Q: What is the nominal stall current for the PMB33F-10214-00 at 240 VAC?
A: This servomotor has a nominal stall current of 11.0 ARMS when powered at 240 VAC max.
Q: What motor size standard does the PMB33F-10214-00 follow?
A: The PMB33F-10214-00 is built to the NEMA Size 34 standard, ensuring compatibility with NEMA 34 mounting systems.









