

PMB33F-10116-03 Pacific Scientific
Wake Industrial LLC is not an authorized distributor of this product.
- Straightforward Pricing: No Rush Fees, No Credit Card Fees
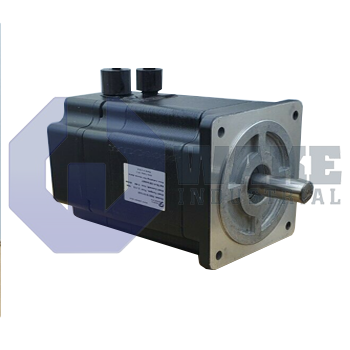
The Pacific Scientific PMB33F-10116-03 is a NEMA Size 34 brushless servomotor in the PMB Brushless Servomotors series. It features a nominal stall current of 11.0 ARMS at 240Vac max and a 4096 ppr digital encoder with commutation. This motor has flying leads with AMP connectors, includes a shaft seal and PTC thermistor, and uses a round shaft design.

To contact sales for pricing and lead time:
Payment Methods

Shipping Methods
Our Credentials


Product Description:
The PMB33F-10116-03 is a servomotor produced by Pacific Scientific for the PMB Brushless Servomotors series. It mates with digital amplifiers to deliver precise torque and velocity control in automated assembly cells, pick-and-place stations, and index tables. By supplying real-time position feedback through an integrated encoder, the unit lets a motion controller execute repeatable moves without mechanical backlash. This arrangement supports smooth acceleration, deceleration, and holding performance on axes that require responsive motion under changing loads.
The mechanical envelope follows the NEMA Size 34 standard, so the 86 mm square face mounts directly to common gearbox or adapter plates. With a nominal stall capability of 11.0 ARMS at 240 VAC, the windings can remain energized at standstill without exceeding thermal limits, which sets the continuous torque baseline for drive sizing. High-density feedback is achieved through a 4096 ppr optical encoder, enabling sub-degree position resolution for tight servo loops. Conductors are supplied as flying leads with AMP connectors, allowing termination in the cabinet rather than on the motor body. Commanded phase alignment and rotor angle are detected through a digital encoder with commutation, eliminating separate Hall devices and reducing electrical startup steps.
The factory option set adds shaft seal and a PTC thermistor, so the front bearing is protected from splash while the thermistor reports temperature excursions to the drive. A round output shaft simplifies direct coupling with collets, pulleys, or flexible couplings and avoids keyway stress concentrations. Magnetic stack height is set at a multiple of 3, which increases continuous torque without changing the frame size or mounting pattern. This option set is useful where the motor may see frequent starts, stops, and dwell periods, and where winding temperature needs to be monitored during operation.
Frequently Asked Questions about PMB33F-10116-03:
Q: What type of connector does the PMB33F-10116-03 servomotor use?
A: This motor uses flying leads with AMP connectors for electrical connection.
Q: What custom features are present in the PMB33F-10116-03 servomotor?
A: A shaft seal and PTC thermistor are included as customizations in this model.
Q: What is the encoder resolution of the PMB33F-10116-03 servomotor?
A: The encoder offers a resolution of 4096 pulses per revolution on this unit.
Q: What motor size is the PMB33F-10116-03 from the PMB series?
A: The PMB33F-10116-03 is built in a NEMA Size 34 frame, suitable for medium-duty automation applications.
Q: What type of sensor is used in the PMB33F-10116-03 servomotor?
A: A digital encoder with integrated commutation is used for sensing in this model.









