

PMB33F-10101-01 Pacific Scientific
Wake Industrial LLC is not an authorized distributor of this product.
- Straightforward Pricing: No Rush Fees, No Credit Card Fees
Current response time:
5 Minutes
36 Seconds
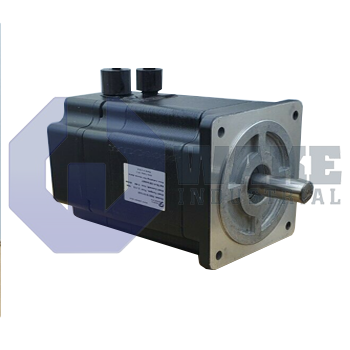
The Pacific Scientific PMB33F-10101-01 is a NEMA Size 34 brushless servomotor with a round shaft and flying leads with AMP connectors. Part of the PMB Brushless Servomotors series, it features a hall sensor and has a nominal stall current of 11.0 ARMS at 240Vac.

To contact sales for pricing and lead time:
Payment Methods

Shipping Methods
Our Credentials


Product Description:
The PMB33F-10101-01 is a brushless servomotor in the PMB Brushless Servomotors series produced by Pacific Scientific. It uses permanent-magnet excitation and electronic commutation to convert commanded current from a servo drive into controlled rotary torque. This operating method supports accurate position and velocity control in packaging machinery, indexing tables, and material handling axes that require repeatable motion. As a brushless servo motor, it is intended for closed-loop applications where stable response and consistent commutation are important during frequent starts, stops, and speed changes.
With a frame coded as NEMA Size 34, the motor uses the mounting dimensions common to size-34 devices. Its nominal stall current is rated at 11.0 ARMS, so the connected drive must be able to supply that continuous phase current at 240 VAC without entering current limit. Power and feedback leave the housing through flying leads with AMP connectors, which keeps the wiring compact while preserving keyed mating features for correct phase order. Rotor position sensing is handled by a Hall sensor, giving the drive the 120-electrical-degree signals needed for startup commutation and direction confirmation. The motor uses a stack length multiple of 3, which means three lamination sections are used in the magnetic circuit to increase torque compared with shorter motor lengths.
The output end uses a round shaft, making it suitable for clamp or set-screw couplings where a keyed interface is not required. A factory-installed shaft seal helps reduce the ingress of coolant mist or fine dust along the shaft journal, which supports bearing protection in wet or abrasive environments. The shaft arrangement keeps the mechanical interface simple for coupling selection, especially in compact servo assemblies with limited space around the motor face. The windings and feedback elements are integrated in a single enclosure, so external cabling stays compact and thermal paths remain short. This layout is well suited to industrial servo installations that need controlled torque, compact routing, and stable feedback during continuous operation.
Frequently Asked Questions about PMB33F-10101-01:
Q: What type of connectors are provided on the PMB33F-10101-01 servomotor?
A: The PMB33F-10101-01 uses flying leads with AMP connectors for its electrical connection.
Q: What is the shaft design of the PMB33F-10101-01 servomotor?
A: This motor features a round shaft design, suitable for applications requiring smooth torque transmission.
Q: Does the PMB33F-10101-01 come with a shaft seal?
A: A shaft seal is included with this servomotor model for additional protection against contaminants.
Q: What is the nominal stall current of the PMB33F-10101-01 at maximum voltage?
A: The PMB33F-10101-01 operates with a nominal stall current of 11.0 ARMS at 240Vac maximum.
Q: What type of feedback sensor is used in the PMB33F-10101-01 servomotor?
A: This model is equipped with a Hall sensor for feedback.









